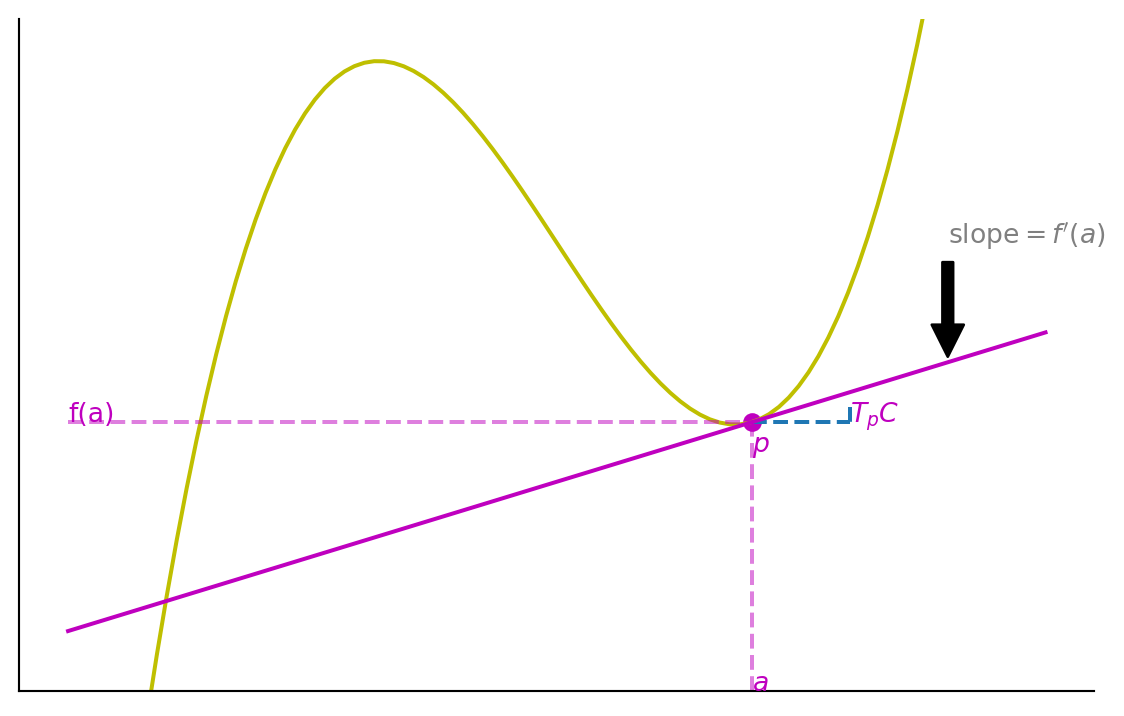
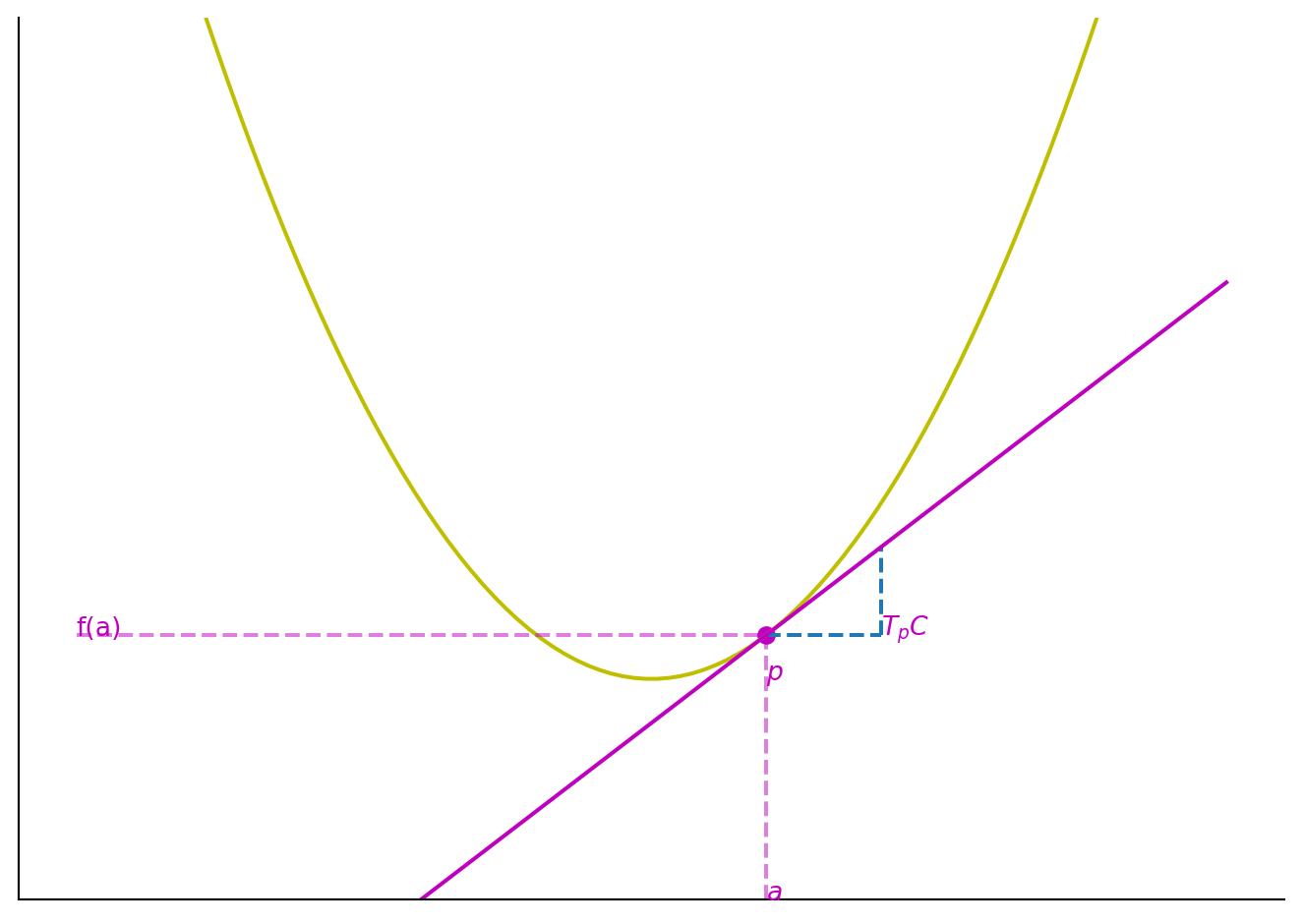
Suppose \(C \subseteq \mathbb{R}^2\) is a curve and \(p \in C\). The tangent space to \(C\) at \(p\), \(T_pC\) is the set of all vectors tangent to \(C\) at \(p\).
Example
Let us say we have a curve \[y = f(x)\], with a point \[p = (a, f(a))\]. A tangent vector at that point can be given by \[\vec v = \langle 1, f^{\prime}(a) \rangle\] where \[\langle \cdot, \cdot \rangle\] is an inner product. Then we can formulate the tangent space
\[T_pC = \text{span} \{ \langle 1, f^{\prime} \rangle \} = \{ \langle c, c f^{\prime}(a) | c \in \mathbb{R} \}.\]
How do we differentiate between points on \(C \subseteq \mathbb{R}^2\) and vectors in \(T_p C \subseteq \mathbb{R}^2\)?
We can create a coordinate system on \(C\)
\[(x,y): C \mapsto \mathbb{R}^2\]
\[(x,y)(p) = (x(p), y(p))\]
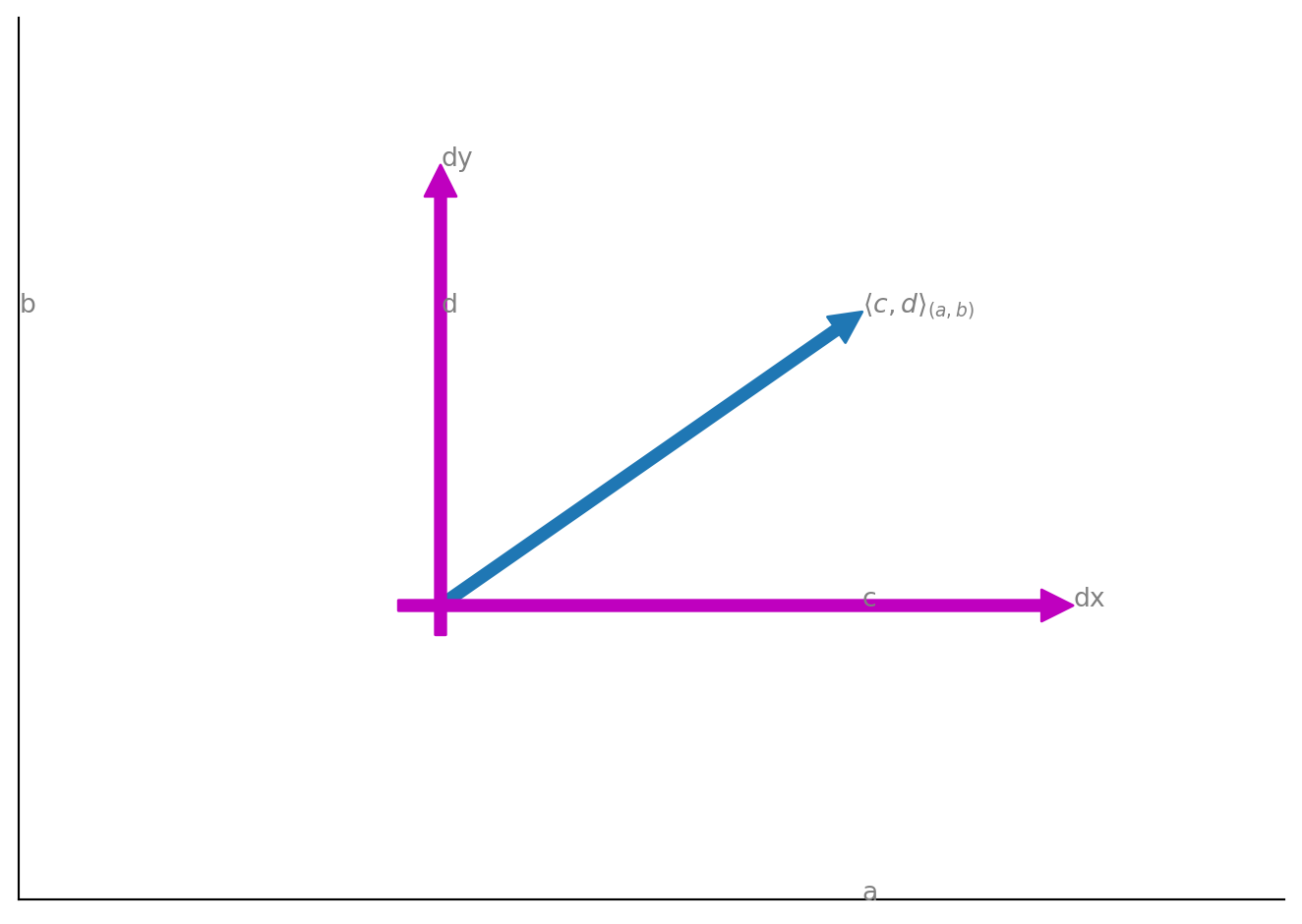
and a coordinate system on \(T_p C\):
\[\langle dx, dy \rangle : T_p C \mapsto \mathbb{R}^r\]
\[\langle dx, dy \rangle = \langle dx(v), dy(v) \rangle\]
Thus \(x: C \mapsto \mathbb{R}\) and \(y: C \mapsto \mathbb{R}\) are combined to get a coordinate vector in the ambient space.
Similarly, \(dx: T_pC \mapsto \mathbb{R}\) and \(dy: T_pC \mapsto \mathbb{R}\) are combined to get a coordinate vector in the tangent space.
Example
Let \(y = x^2\), then the coordinate vector is \((x,y)(p) = (a, a^2) \in C\). Similarly \(\langle dx, dy \rangle (v) = \langle 1, 2a \rangle \in T_pC\) where \(v\) is a tangent vector to the function.
A 1-form is a linear function \(\omega : T_p \mathbb{R}^n \mapsto \mathbb{R}\).
Proposition
For a 1-form \(\omega : T_p \mathbb{R}^n \mapsto \mathbb{R}\) it holds that \(\omega \in (T_p \mathbb{R})^{*}\) where \((T_p \mathbb{R})^{*}\) is the dual space of the tangent space \(T_p \mathbb{R}\).
Example
Given \(\mathbb{R}^2\) and \(T_p \mathbb{R}^2\) and \(\omega : T_p \mathbb{R}^2 \mapsto \mathbb{R}\) be linear:
\[\implies \omega (\langle dx, dy \rangle) = adx + bdx = \langle a, b \rangle \cdot \langle dx, dy \rangle\]
which also equals
\[\vert| \langle a, b \rangle \vert| \operatorname{scalar\_projection}_{\langle a,b \rangle} \langle dx, dy \rangle .\]
This leads to an intuition that a 1-form is a multiple of the scalar projection on to the same line.
Example
Let \(\omega : T_p \mathbb{R}^n \mapsto \mathbb{R}\) then
Define \(\omega (\langle dx, dy \rangle) = 3dx + 2dy.\) What line does \(\omega\) project vectors onto?
The line is in the direction \(\langle 3, 2 \rangle\) b/c \(\omega ( \langle dx, dy \rangle ) = \langle 3,2 \rangle \cdot \langle dx, dy \rangle\)
Notice that \(\langle 3,2 \rangle\) is parallel to \(\langle 1, \frac{2}{3} \rangle\) which entails that \(dy = \frac{2}{3} x.\)
Example
Suppose \(\omega\) scalar projects onto the line \(dy = 2dx\) with length of 3. Find \(\omega .\)
We know that \(\omega (\langle dx, dy \rangle) = \langle a,b \rangle \cdot \langle dx, dy \rangle .\) We need \(\langle a, b \rangle\) to be parallel to \(\langle 1, 2 \rangle\) because \(\langle 1, 2 \rangle\) is the vector in the direction of the line \(dy = 2dx\).
So \(\langle a, b \rangle = \langle a, 2a \rangle\) which needs that have \[\vert| \langle a, 2a \rangle \vert| = 3 \] .
So \[\vert| \langle a, 2a \rangle \vert| = \sqrt{a^2 + 4 a^2} = 3 \implies a \sqrt{5} = 3 \implies a = \frac{3}{\sqrt{5}}\] . So \(b=\frac{6}{\sqrt{5}}\)